Audiencia¶
Estudiantes de doctorado del Instituto de Hidrología de Llanuras, IHLLA, y de otros centros de investigación o universidades, no necesariamente argentinos, pero relacionados con Hidrología, Sensores Remotos, Simulación Numérica de Recursos Hídricos, Evaluación de Riesgo de Desastres Naturales o Sistemas de Alerta Temprana.
Se impartió en castellano, aunque gran parte de la documentación de soporte y links están en inglés. Todo el software empleado y los accesos a recursos en internet están en abierto.
Se ideó en 8 sesiones de 3 horas cada una, dos por semana, en horario de oficina, huso UTC-3.
Objetivos¶
Revisar conceptos básicos de Hidrología para introducirse en la modelización y explotación de datos con las técnicas más recientes, y adquirir autonomía para trabajar con:
Uso de librerías y software abierto: Python, JavaScript, R, Linux shells.
Balance de masa en la vertical.
Procesado de imágenes drone para obtener orto-fotos y modelos digitales de elevaciones.
Aforo de caudales con LSPIV.
Simulaciones hidrodinámicas 2D en entorno urbano y en glaciares.
Inicio y duración¶
Comenzó el 10 de Octubre de 2023, 10:00 am (UTC-3), y se impartió en sesiones de tres horas, dos por semana (Martes y Jueves), con un total de 24 horas de duración, en modalidad híbrida presencial y remota.
Docentes¶
Para información adicional contactar con:
Sesiones primer bloque, 6h¶
10 Octubre: Python¶
Presentación del curso: alcances, objetivos, estructura de cursado y trabajo en clases, condiciones de evaluación.
Problema de partida: inundaciones en la llanura pampeana.
Nociones básicas de programación, uso de lenguaje Python para la ED de balance vertical de una laguna.
Presentación del caso particular de Martín Blanco: procesado de datos Hidro-Meteorológicos GFS.
Habilitación de Windows-Subsystem para Linux con Ubuntu, para ejecutar transferencia de ficheros con wget, y códigos de cálculo como SWAT y Lisflood-FP.


12 Octubre: Python ampliado¶
Verificación del Set-Up de WSL con Ubuntu. Solución Powershell 7.3.8
Resolución del caso particular: procesado de datos Hidro-Meteorológicos GFS.
Descarga de Open-Drone-Map v3.2.1 y ficheros de imágenes de testeo, lago Güemes.
Ampliación del código Python de balance en la vertical para una laguna. Realización del informe.
Revisión de dudas, comentarios y preparación para la siguiente semana. Verificación de la primera ejecución con Open-Drone-Map.
Sesiones segundo bloque, 6h¶
17 de Octubre: Open-Drone-Map¶
Descarga e instalación de QGIS en caso de no tener GIS, descarga de imágenes del Puente de Pellegrini.
Revisión de la salida de ODM con opción fast-orthophoto para georeferenciar en 2D un cuerpo de agua como el lago Güemes.
Ejecución con ODM del relevamiento 3D del Puente de Pellegrini con pixel de un metro para DSM y DTM.
Presentación del caso particular de Camila Gregorini: ploteando magnitudes adimensionales.
Sensibilidad del DTM a los parámetros de calidad y de filtro SMRF de ODM.
19 de Octubre: procesado LSPIV¶
Descarga e instalación de RIVeR, con librería MATLAB runtime.
Teoría básica de Structure-From-Motion y revisión de los procesados previos con ODM, análisis de nubes de puntos con Meshlab
Presentación del caso particular de Ninoska Briceño: balance en una cubeta.
Ajuste de curvas por mínimos cuadrados con R.
Introducción a LSPIV para medir el campo de velocidad de la superficie libre de un fluído.
Práctica con software LSPIV RIVeR basado en Matlab, caso puente A2.
Sesiones tercer bloque, 12h¶
24 Octubre: Inicio modelado HD-2D¶
Segunda parte del procesado LSPIV con RIVeR para el puente A2.
Introducción al Flood-Mapping.
Modelización Hidrodinámica 2D en escala urbana con las ecuaciones de Saint Venant y HEC-RAS, caso particular de Azul, Tesina de Maestría de Crysthian Sánchez. Tabla comparativa de las tecnologías involucradas.
26 de Octubre: Salida Campo¶
Salida de campo para comparar diversas formas de aforo: mecánico frente a video con celular y drone.
31 de Octubre:¶
Revisión de los aforos con LSPIV en La Firmeza.
Caso particular del Atuel-Salado con software open-source, Tesis Doctoral de Ramiro Páez.
2 de Noviembre:¶
Configuración de escenarios GLOF (Glacial Lake Outburst Flood), presentado por Matías Maino y Daniela Schmidt:
Dinámica del deslizamiento de masas por laderas.
Continuación del modelo HEC-RAS 2D de Azul básico (conservación masa, breaklines) y avanzado (opciones SWE, CFL, modificaciones terreno, puentes, lluvia, etc.).
Enlaces del software de descarga y Datos compartidos¶
Python GNUPLOT R Ubuntu Windows-Subsystem for Linux Open-Drone-Map QGIS RIVeR HEC-RAS
Cuarto bloque, programado para 2024: Google-Earth-Engine y otros recursos en la nube, 30h¶
Introducción a Google-Earth-Engine.
Detección de cuerpos de agua con GEE e imágenes satelitales MSI:
Bases de datos globales: JRC y GFDB.
Indice NDWI, clasificación por valor umbral, distribución de Otsu.
Caso particular: reservorios.
Clasificadores con entrenamiento no supervisados.
Clasificadores con entrenamiento supervisados.
Cruzado con MDE (FABDEM) para calcular volúmenes de agua. Herramientas para GIWs (Geographically Isolated Wetlands), por Qiusheng Wu, con Python dentro de COLAB.
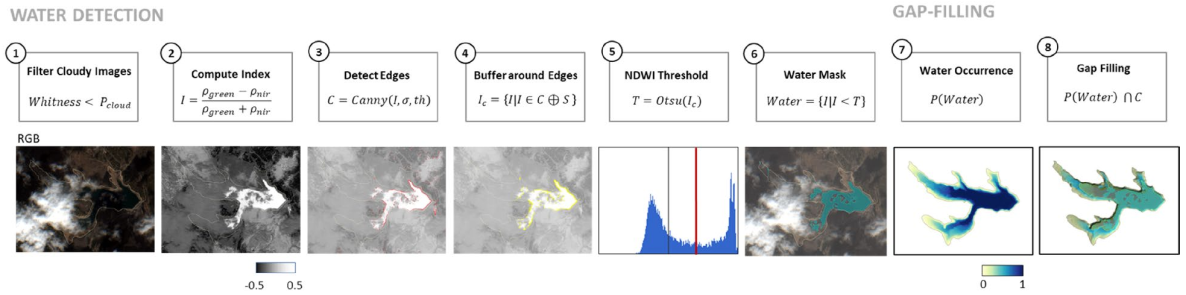
Water Bodies Detection Steps, siguiendo a Donchyts, 2022.¶
Análisis de precipitación diaria en grilla de 0.05° con la misión satelital CHIRPS, y con la misión GPM-IMERG de grilla 0.1° e intervalo de 30 minutos. Series temporales.
Seguimiento de sequías con el índice NDVI (Normalized Difference Vegetation Index).